Как работают синхронные машины?
Как работают синхронные машины?
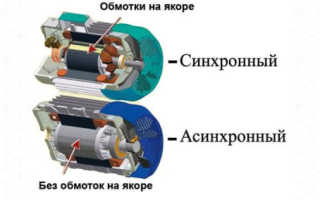
Если в рассмотренных выше асинхронных машинах ротор имел частоту вращения, отличную от частоты вращения магнитного поля статора, то в синхронных эти частоты равны между собой.
Синхронные машины могут работать как генераторами, так и двигателями.
В зависимости от типа привода синхронные генераторы получили и свои названия.
Турбогенератор, например, — это генератор, приводимый в движение паровой турбиной, гидрогенератор вращает водяное колесо, а дизель — генератор механически связан с двигателем внутреннего сгорания.
Синхронные двигатели широко применяют для привода мощных компрессоров, насосов, вентиляторов.
Синхронные микродвигатели используют для привода лентопротяжных механизмов регистрирующих приборов, магнитофонов и т.д.
Определение и принцип действия
Если говорить простым языком, то синхронным называют электродвигатель, у которого скорость вращения ротора (вала) совпадает со скоростью вращения магнитного поля статора.
Кратко рассмотрим принцип действия такого электродвигателя — он основан на взаимодействии вращающегося магнитного поля статора, которое обычно создаётся трёхфазным переменным током и постоянного магнитного поля ротора.
Постоянное магнитное поле ротора создаётся за счет обмотки возбуждения или постоянных магнитов. Ток в обмотках статора создаёт вращающееся магнитное поле, тогда как ротор в рабочем режиме представляет собой постоянный магнит, его полюса устремляются к противоположным полюсам магнитного поля статора. В результате ротор вращается синхронно с полем статора, что и является его основной особенностью.
Напомним, что у асинхронного электродвигателя скорость вращения МП статора и скорость вращения ротора отличаются на величину скольжения, а его механическая характеристика «горбатая» с пиком при критическом скольжении (ниже его номинальной скорости вращения).
Скорость, с которой вращается магнитное поле статора, может быть вычислена по следующему уравнению:
f – частота тока в обмотке, Гц, p – количество пар полюсов.
Соответственно по этой же формуле определяется скорость вращения вала синхронного двигателя.
Большинство электродвигателей переменного тока, используемых на производстве, выполнены без постоянных магнитов, а с обмоткой возбуждения, тогда как маломощные синхронные двигатели переменного тока выполняются с постоянными магнитами на роторе.
Ток к обмотке возбуждения подводится за счет колец и щеточного узла. В отличие от коллекторного электродвигателя, где для передачи тока вращающейся катушке используется коллектор (набор продольно расположенных пластин), на синхронном установлены кольца поперек одного из концов статора.
Источником постоянного тока возбуждения в настоящее время являются тиристорные возбудители, часто называемые «ВТЕ» (по названию одной из серий таких устройств отечественного производства). Ранее использовалась система возбуждения «генератор-двигатель», когда на одном валу с двигателем устанавливали генератор (он же возбудитель), который через резисторы подавал ток в обмотку возбуждения.
Ротор почти всех синхронных двигателей постоянного тока выполняется без обмотки возбуждения, а с постоянными магнитами, они хоть и похожи по принципу действия на СД переменного тока, но по способу подключения и управления ими очень сильно отличаются от классических трёхфазных машин.
Одной из основных характеристик электродвигателя является механическая характеристика. Она у синхронных электродвигателей приближена к прямой горизонтальной линии. Это значит, что нагрузка на валу не влияет на его обороты (пока не достигнет какой-то критической величины).
Это достигается именно благодаря возбуждению постоянным током, поэтому синхронный электродвигатель отлично поддерживает постоянные обороты при изменяющихся нагрузках, перегрузках и при просадках напряжения (до определенного предела).
Ниже вы видите условное обозначение на схеме синхронной машины.
Отличие от асинхронного двигателя
Основным отличием синхронного электродвигателя от асинхронного заключается в принципе преобразования электрической энергии в механическое вращение. У синхронного электродвигателя процесс вращения ротора идентичен вращению рабочего электромагнитного поля, вырабатываемого трехфазной сетью. А вот у асинхронного рабочее поле самостоятельно наводит ЭДС в роторе, которая уже затем вырабатывает собственный поток взаимоиндукции и приводит вал во вращение. В результате чего асинхронные электрические машины получают разность во вращении рабочего поля и нагрузки на валу, что выражается физической величиной – скольжением.
В работе классические модели асинхронных электродвигателей с короткозамкнутым ротором:
- плохо переносят перегрузки;
- имеют сложности пуска со значительным усилием;
- меняют скорость вращения, в зависимости от нагруженности рабочего органа.
В некоторой степени эти недостатки преодолевает асинхронный двигатель с фазным ротором, но в полной мере избавиться от недостатков получается лишь синхронному агрегату.
Рис. 5. Отличие асинхронного от синхронного электродвигателя
Управление синхронным двигателем с постоянными магнитами
Для работы синхронного двигателя с постоянными магнитами обязательно требуется система управления, например, частотный преобразователь или сервопривод. При этом существует большое количество способов управления реализуемых системами контроля. Выбор оптимального способа управления, главным образом, зависит от задачи, которая ставится перед электроприводом. Основные методы управления синхронным электродвигателем с постоянными магнитами приведены в таблице ниже.
| Управление | Преимущества | Недостатки | |||
|---|---|---|---|---|---|
| Синусоидальное | Скалярное | Простая схема управления | Управление не оптимально, не подходит для задач, где нагрузка меняется, возможна потеря управляемости | ||
| Векторное | Полеориентированное управление | С датчиком положения | Плавная и точная установка положения ротора и скорости вращения двигателя, большой диапазон регулирования | Требуется датчик положения ротора и мощный микроконтроллер системы управления | |
| Без датчика положения | Не требуется датчик положения ротора. Плавная и точная установка положения ротора и скорости вращения двигателя, большой диапазон регулирования, но меньше, чем с датчиком положения | Бездатчиковое полеориентированное управление во всем диапазоне скоростей возможно только для СДПМ с ротором с явно выраженными полюсами, требуется мощная система управления | |||
| Прямое управление моментом | Простая схема управления, хорошие динамические характеристики, большой диапазон регулирования, не требуется датчик положения ротора | Высокие пульсации момента и тока | |||
| Трапециидальное | Без обратной связи | Простая схема управления | Управление не оптимально, не подходит для задач, где нагрузка меняется, возможна потеря управляемости | ||
| С обратной связью | С датчиком положения (датчиками Холла) | Простая схема управления | Требуются датчики Холла. Имеются пульсации момента. Предназначен для управления СДПМ с трапециидальной обратной ЭДС, при управлении СДПМ с синусоидальной обратной ЭДС средний момент ниже на 5%. | ||
| Без датчика | Требуется более мощная система управления | Не подходит для работы на низких оборотах. Имеются пульсации момента. Предназначен для управления СДПМ с трапециидальной обратной ЭДС, при управлении СДПМ с синусоидальной обратной ЭДС средний момент ниже на 5%. | |||
Для решения несложных задач обычно используется трапециидальное управление по датчикам Холла (например — компьютерные вентиляторы). Для решения задач, которые требуют максимальных характеристик от электропривода, обычно выбирается полеориентированное управление.
Трапециидальное управление
Одним из простейших методов управления синхронным двигателем с постоянными магнитами является — трапецеидальное управление. Трапециидальное управление применяется для управления СДПМ с трапециидальной обратной ЭДС. При этом этот метод позволяет также управлять СДПМ с синусоидальной обратной ЭДС, но тогда средний момент электропривода будет ниже на 5%, а пульсации момента составят 14% от максимального значения. Существует трапециидальное управление без обратной связи и с обратной связью по положению ротора.
Управление без обратной связи не оптимально и может привести к выходу СДПМ из синхронизма, т.е. к потери управляемости.
- Управление с обратной связью можно разделить на:
- трапециидальное управление по датчику положения (обычно — по датчикам Холла);
- трапециидальное управление без датчика (бездатчиковое трапециидальное управление).
В качестве датчика положения ротора при трапециидальном управлении трехфазного СДПМ обычно используются три датчика Холла встроенные в электродвигатель, которые позволяют определить угол с точностью ±30 градусов. При таком управление вектор тока статора принимает только шесть положений на один электрический период, в результате чего на выходе имеются пульсации момента.
Полеориентированное управление
Полеориентированное управление позволяет плавно, точно и независимо управлять скоростью и моментом бесщеточного электродвигателя. Для работы алгоритма полеориентированного управления требуется знать положение ротора бесщеточного электродвигателя.
- Существует два способа определения положения ротора:
- по датчику положения;
- без датчика — посредством вычисления угла системой управления в реальном времени на основе имеющейся информации.
Полеориентированное управление СДПМ по датчику положения
- В качестве датчика угла используются следующие типы датчиков:
- индуктивные: синусно-косинусный вращающийся трансформатор (СКВТ), редуктосин, индуктосин и др.;
- оптические;
- магнитные: магниторезистивные датчики.
Полеориентированное управление СДПМ без датчика положения
Благодаря бурному развитию микропроцессоров с 1970-х годов начали разрабатываться бездатчиковые векторные методы управления бесщеточными электродвигателями переменного тока. Первые бездатчиковые методы определения угла были основаны на свойстве электродвигателя генерировать обратную ЭДС во время вращения. Обратная ЭДС двигателя содержит в себе информацию о положении ротора, поэтому вычислив величину обратной ЭДС в стационарной системе координат можно рассчитать положение ротора. Но, когда ротор не подвижен, обратная ЭДС отсутствует, а на низких оборотах обратная ЭДС имеет маленькую амплитуду, которую сложно отличить от шума, поэтому данный метод не подходит для определения положения ротора двигателя на низких оборотах.
- Существует два распространенных варианта запуска СДПМ:
- запуск скалярным методом — запуск по заранее определенной характеристики зависимости напряжения от частоты. Но скалярное управление сильно ограничивает возможности системы управления и параметры электропривода в целом;
- метод наложения высокочастотного сигнала – работает только с СДПМ у которого ротор имеет явно выраженные полюса.
На текущий момент бездатчиковое полеориентированное управление СДПМ во всем диапазоне скоростей возможно только для двигателей с ротором с явно выраженными полюсами.
Принцип действия
Двигательный принцип
Принцип действия синхронного двигателя основан на взаимодействии вращающегося магнитного поля якоря и магнитного поля полюсов индуктора. Обычно якорь расположен на статоре, а индуктор — на роторе. В мощных двигателях в качестве полюсов используются электромагниты (ток на ротор подаётся через скользящий контакт щетка — кольцо), в маломощных — постоянные магниты. Существует обращённая конструкция двигателей, в которой якорь расположен на роторе, а индуктор — на статоре (в устаревших двигателях, а также в современных криогенных синхронных машинах, в которых в обмотках возбуждения используются сверхпроводники.)
Запуск двигателя. Двигатель требует разгона до частоты, близкой к частоте вращения магнитного поля в зазоре, прежде чем сможет работать в синхронном режиме. При такой скорости вращающееся магнитное поле якоря сцепляется с магнитными полями полюсов индуктора (если индуктор расположен на статоре, то получается, что вращающееся магнитное поле вращающегося якоря (ротора) неподвижно относительно постоянного поля индуктора (статора), если индуктор на роторе, то магнитное поле вращающихся полюсов индуктора (ротора) неподвижно относительно вращающегося магнитного поля якоря (статора)) — это явление называется «вход в синхронизм».
Для разгона обычно используется асинхронный режим, при котором обмотки индуктора замыкаются через реостат или накоротко, как в асинхронной машине, для такого режима запуска в машинах на роторе делается короткозамкнутая обмотка, которая также выполняет роль успокоительной обмотки, устраняющей «раскачивание» ротора при синхронизации. После выхода на скорость близкую к номинальной (>95%) индуктор запитывают постоянным током.
В двигателях с постоянными магнитами применяется внешний разгонный двигатель.
Часто на валу ставят небольшой генератор постоянного тока, который питает электромагниты.
Также используется частотный пуск, когда частоту тока якоря постепенно увеличивают от 0 до номинальной величины. Или наоборот, когда частоту индуктора понижают от номинальной до 0, т.е. до постоянного тока.
Частота вращения ротора [об/мин] остаётся неизменной, жёстко связанной с частотой сети [Гц] соотношением:
,
где — число пар полюсов ротора.
Синхронные двигатели при изменении возбуждения меняют импеданс с емкостного на индуктивный. Перевозбуждённые СД на холостом ходу применяют в качестве компенсаторов реактивной мощности. Синхронные двигатели в промышленности обычно применяют при единичных мощностях свыше 300 кВт, при меньших мощностях обычно применяется более простой (и надежный) асинхронный двигатель с короткозамкнутым ротором.
Генераторный режим
Обычно синхронные генераторы выполняют с якорем, расположенным на статоре, для удобства отвода электрической энергии. Поскольку мощность возбуждения невелика по сравнению с мощностью, снимаемой с якоря (0,3. 2%), подвод постоянного тока к обмотке возбуждения с помощью двух контактных колец не вызывает особых затруднений. Принцип действия синхронного генератора основан на явлении электромагнитной индукции; при вращении ротора магнитный поток, создаваемый обмоткой возбуждения, сцепляется поочередно с каждой из фаз обмотки статора, индуцируя в них ЭДС. В наиболее распространенном случае применения трехфазной распределенной обмотки якоря в каждой из фаз, смещенных друг относительно друга на 120 градусов, индуцируется синусоидальная ЭДС. Соединяя фазы по стандартным схемам «треугольник» или «звезда», на выходе генератора получают трехфазное напряжение, являющееся общепринятым стандартом для магистральных электросетей.
Частота индуцируемой ЭДС [Гц] связана с частотой вращения ротора [об/мин] соотношением:
,
где — число пар полюсов ротора.
Часто синхронные генераторы используют вместо коллекторных машин для генерации постоянного тока, подключая их обмотки якоря к трехфазным выпрямителям.
Мир науки
Машина называется синхронной, если частота вращения связана постоянным отношением с частотой f сети переменного тока, в которую эта машина включается. Такие машины применяют в качестве генераторов переменного тока промышленной частоты, синхронных двигателей, когда нужен двигатель, который работает при постоянной частоте вращения.
Синхронная машина состоит из статора и ротора, при этом статор похож на статор асинхронной машины. Сердечник статора собирается из листов электротехнической стали, которые изолированы друг от друга, и укрепляется внутри массивного корпуса. В пазах внутри статора размещается обмотка переменного тока, которая чаще всего является трехфазной.
Ротор синхронной машины является электромагнитом с неявно выраженными полюсами или с явно выраженными полюсами. На обмотку возбуждения ток поступает через контактные кольца и щетки от внешнего источника постоянного тока, который называют возбудителем.
Многополюсная синхронная машина содержит ротор с р парами полюсов. Токи в обмотке статора формирует р пар полюсов магнитного поля, совершающего вращения. Ротор вращается с частотой вращения магнитного поля, т. е. его скорость. Синхронные двигатели широко применяют для разных видов привода, которые работают с постоянной частотой вращения. Чаще всего данные двигатели являются явно полюсными мощностью от 40 до 7500 кВт, с частотами вращения от 125 до 1000 об/мин.
Двигатели и генераторы отличаются наличием на роторе дополнительной короткозамкнутой обмотки или подобного приспособления. Также различие выражается в меньшем воздушном зазоре между статором и ротором. Синхронные двигатели имеют КПД выше, чем асинхронный двигатель той же массы.
Для синхронных машин иногда используются те же названия, как и в машинах постоянного тока: якорем называют часть, в обмотке которой индуктируется э. д. с., т. е. в синхронных машинах статор является якорем. Индуктором, который возбуждает главный магнитный поток, в синхронной машине является ротор.
Важное отличие синхронной и асинхронной машин заключается в том, что главный магнитный поток в ней создает намагничивающая сила постоянного тока возбуждения, получаемого машиной от возбудителя. Поэтому синхронная машина при работе в режиме двигателя может не загружать сеть намагничивающим током. Чаще всего в качестве возбудителей применяются небольшие генераторы постоянного тока с самовозбуждением или генераторы с независимым возбуждением от подвозбудителя.
Синхронная машина является обратимой, т. е. может работать как двигатель и как генератор. Машина переходит из режима генератора к режиму двигателя в зависимости от действия на ее вал вращающей или тормозящей механической силы. Если действует вращающая сила, машина получает на валу механическую энергию, которую он перерабатывает в электрическую. Если действует тормозящая сила, машина потребляет из сети электрическую энергию перерабатывает ее в механическую.
Для синхронного генератора рабочий процесс определяется тем, связана ли его частота и э. д. с. с частотой тока в сети, которая питается другими синхронными генераторами, или он работает независимо и сам задает частоту тока в сети.
При независимой работе частота сети изменяет значение вместе с частотой вращения первичного двигателя, который вращает синхронный генератор. При этом э. д. с, которые индуктируются в обмотках статора, при подключении нагрузки создают токи в обмотках статора. Эти токи взаимодействуют с магнитным полем машины и создают тормозящую силу, преодолевающую первичный двигатель. При увеличении нагрузки генератора увеличивается и тормозящая сила, приводящая к преобразованию механической мощности первичного двигателя в электрическую мощность, которая отдается в сеть.
Когда синхронный генератор работает параллельно с сетью, которая питается другими генераторами, частота машины соответствует частоте сети. Однако для того чтобы частота машины была постоянной, необходимо постоянно синхронизировать часто- ту вращения ротора, чтобы индуктируемая им э. д. с. Совпадала с изменениями напряжения внешней сети.
Поле ротора, которое является главным магнитным полем, возбуждается постоянным током, но, кроме него, трехфазная система переменных токов статора образует свое магнитное поле. Генераторный режим машины характеризуется опережением ротором поля статора, при котором взаимодействие токов статора и поля машины создает механическую силу, которая тормозит вращение ротора; эту силу необходимо преодолевать первичному двигателю машины.
В случае параллельной работы синхронной машины с другими синхронными машинами, для того чтобы включить машины в общую сеть, нужна предварительная синхронизация. Она заключается в том, чтобы приравнять частоту вращения машины с частотой сети. При этом э. д. с. машины должна быть равна по величине и противоположна по фазе напряжению сети. В случае идеальной синхронизации машины и сети токи в обмотках статора после включения машины на параллельную работу станут равными в результате того, что поле ротора индуктирует в обмотках статора э. д. с., которые уравновешивают полностью напряжение сети. При этом синхронная машина не будет отдавать энергию в сеть и не будет потреблять ее. Таким образом, машина не является ни генератором, ни двигателем. Потери такой машины, механические и магнитные, при этих условиях покрывает первичный двигатель, т. е. чтобы синхронная машина, которая включена в сеть, работала как генератор, отдавая в эту сеть энергию, нужно увеличить механический момент, приложенный первичным двигателем к валу машины.
Возбуждение синхронных машин
Возбуждение синхронных машин может производиться за счет электромагнитного воздействия или же постоянного магнита. В случае с электромагнитным возбуждением применяется специальный генератор постоянного тока, который и питает обмотку, в связи со своей основной функцией данное устройство получило название возбудитель. Стоит отметить, что система возбуждения также делится на два вида по способу воздействия – прямой и косвенный. Прямой метод возбуждения подразумевает, что вал синхронной машины напрямую соединен механическим способом с ротором возбудителя. Косвенный же метод предполагает, что для того чтобы заставить ротор вращаться используется другой двигатель, например асинхронная электромашина.
Наибольшее распространение сегодня получил именно прямой метод возбуждения. Однако в тех случаях, когда предполагается работа системы возбуждения с мощными синхронными электромашинами применяют генераторы независимого возбуждения, на обмотку которых ток подается с другого источника постоянного тока, называемого подвозбудителем. Несмотря на всю громоздкость, данная система позволяет добиться большей стабильности в работе, а также более тонкой настройки характеристик.
6.5. ШАГОВЫЙ ДВИГАТЕЛЬ
Этот тип двигателя является машиной постоянного тока, хотя принцип действия его напоминает синхронный реактивный двигатель.
Как видно из рис. 6.5.1, статор двигателя имеет шесть пар выступающих полюсов.
Каждые две катушки, расположенные на противоположных полюсах статора, образуют обмотку управления, включаемую, в сеть постоянного тока. Ротор — двухполюсный.
Если подключить к источнику постоянного тока катушки полюсов 1 — 1′, то ротор расположится вдоль этих полюсов. Если задействовать катушки полюсов 2 — 2′, а ка-тушки полюсов 1 — 1′ обесточить, то ротор повернется и займет положение вдоль полю-сов 2 — 2′. Такой же поворот ротора произойдет, если включить в сеть катушки полюсов 3 — 3′. Так, шагами, ротор будет «следовать» за своей обмоткой управления.
Преимуществом шаговых двигателей является то, что в них совершенно отсутствует «самоход». Они поворачиваются и строго фиксируются с шагом, пропорциональ-ным числу полюсов на статоре. Это качество делает его незаменимым в особо точных механизмах (для привода часов, механизмов подачи ядерного топлива в реакторах, в станках с ЧПУ и т.д.).
Управление шаговыми двигателями ведется с применением различных электронных устройств (триггеров Шмидта и др.).
Принцип действия машины в режиме синхронного генератора:
- При пропускании через обмотку возбуждения постоянного тока образуется стабильное во времени магнитное поле с чередующейся полярностью.
- При вращении магнитного поля относительно проводников обмотки якоря возбуждаются переменные ЭДС.
- Переменные ЭДС суммируются, образуя ЭДС фаз. Трехфазная система образуется тремя одинаковыми обмотками, размещаемыми на якоре под электрическим углом друг к другу, равным 120°.
В случаях, если централизованное электроснабжение имеет недостаточную мощность или отсутствует, как, например, на удаленных стройплощадках, нефтегазодобывающих объектах, морских и воздушных судах, СГ в составе с двигателем внутреннего сгорания функционируют в автономном режиме. При необходимости создания мощных источников питания синхронные двигатели включают на параллельную работу. Такой способ включения позволяет более полно использовать мощность каждой машины и при необходимости выводить отдельные СГ в ремонт без прекращения эффективного электроснабжения потребителей.
Второй режим работы синхронной машины — выполнение функций электродвигателя. Обычно СГ востребован в качестве двигателя в высокомощных установках более 50 кВт. Для работы в режиме электродвигателя обмотку статора подключают к электросети, а обмотку ротора — к источнику постоянного тока. Вращающий момент возникает при взаимодействии вращающегося магнитного поля СГ с постоянным током обмотки возбуждения.